Goal
Using a depth camera, OpenCV and ROS, develop an API to recognize number of fingers from 0 to 5.
Demo
Project Website
This project was integrated into another bigger project on TurtleBot navigation and can be viewed here: TurtleBot Navigation
Project Details
The project can be summarized in the following 5 steps:
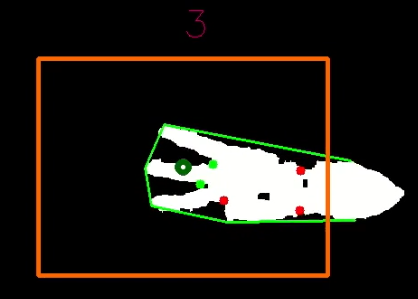
- Extract hand region from raw depth data.
- Determine convex hull and convexity defects of extracted hand region.
- Detect no. of fingers using the convexity defects from (2).
- Create a custom image window to show the recognition in real-time.
- Integrate with ROS.
The code (integrated with ROS & the TurtleBot project) is available on GitHub: patilnabhi/tbotnav
Future Work
Improve the fingers recognition results by combining with skin-color segmentation and machine learning.
This project was completed as part of the MS in Robotics (MSR) program at Northwestern University.