Project Website
https://github.com/patilnabhi/tlpr
About
A ROS tutorial developed as part of ME495 - Embedded Systems in Robotics course in Northwestern University.
Goal
To design a Two Link Planar Robot (TLPR) whose end effector traces and draws a circle.
Project Objectives
- Develop an URDF for TLPR.
- Use inverse kinematics to determine the joint angles given following trajectory:
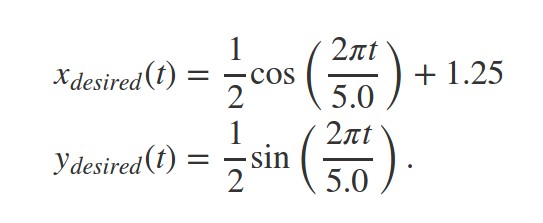
- Move the end effector by publishing
sensor_msgs/JointStatemessage. - Animate the trajectory by repeatedly using
lookupTransformoftf.TransformListenerand publishing avisualization_msgs/Markerto visualize path of the end effector.
Project Demo